 APP
APP 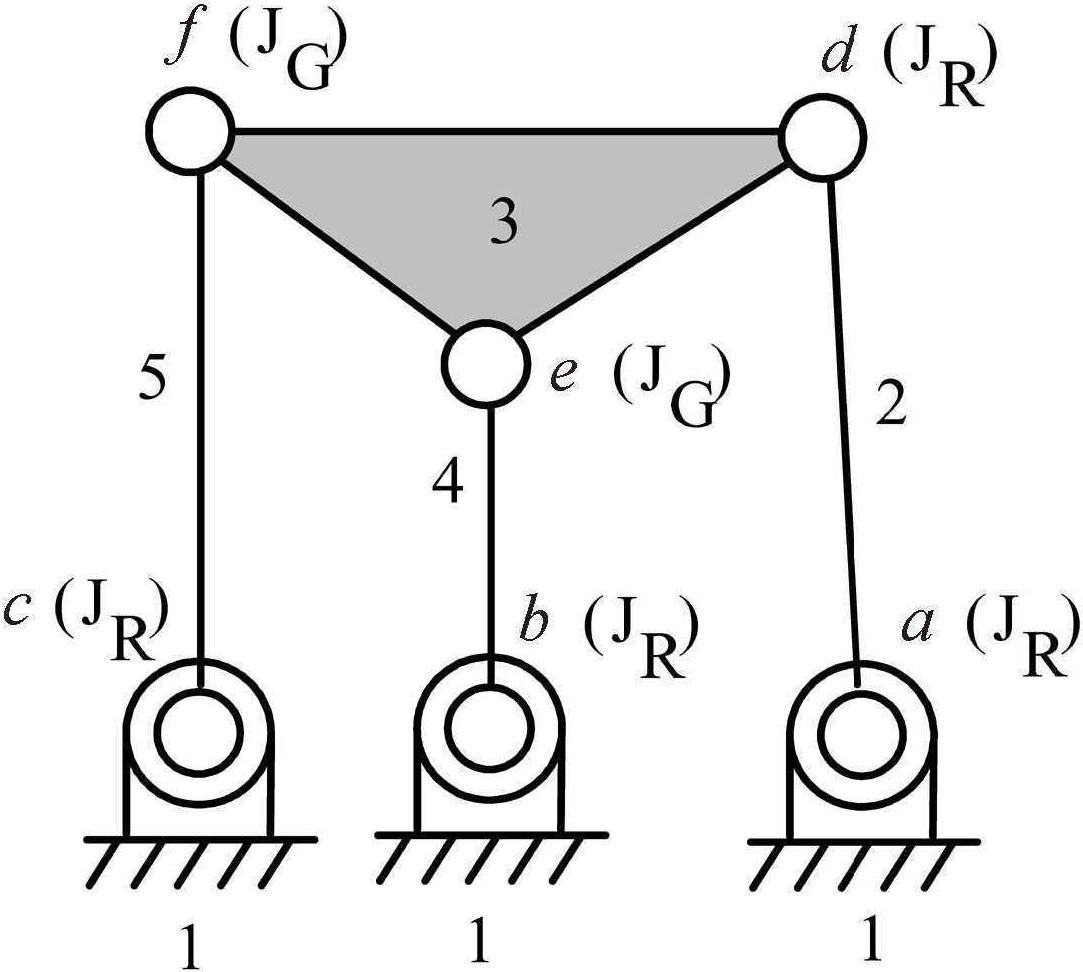
對于圖4.11所示的兩個(5,6)一般化運動鏈,由于固定桿須為多接頭桿,且不可包含在一個三桿回路中,因此只有圖4.11(a)所示的一般化運動鏈能夠指定固定桿。其所對應(yīng)的特殊化行星齒輪系,可由下列步驟確定:(a)(b)圖4.11(5,6)一般化運動鏈圖 (共 404 字) [閱讀本文] >>
海量資源,盡在掌握
對于圖4.11所示的兩個(5,6)一般化運動鏈,由于固定桿須為多接頭桿,且不可包含在一個三桿回路中,因此只有圖4.11(a)所示的一般化運動鏈能夠指定固定桿。其所對應(yīng)的特殊化行星齒輪系,可由下列步驟確定:(a)(b)圖4.11(5,6)一般化運動鏈圖 (共 404 字) [閱讀本文] >>
